Choropleth Mapping
Introduction
When PySAL was originally planned, the intention was to focus on the computational aspects of exploratory spatial data analysis and spatial econometric methods, while relying on existing GIS packages and visualization libraries for visualization of computations. Indeed, we have partnered with esri and QGIS towards this end.
However, over time we have received many requests for supporting basic geovisualization within PySAL so that the step of having to interoperate with an exertnal package can be avoided, thereby increasing the efficiency of the spatial analytical workflow.
In this notebook, we demonstrate several approaches towards a particular subset of geovisualization methods, namely choropleth maps. We start with a self-contained exploratory workflow where no other dependencies beyond PySAL are required. The idea here is to support quick generation of different views of your data to complement the statistical and econometric work in PySAL. Once your work has progressed to the publication stage, we point you to resources that can be used for publication quality output.
We then move on to consider three other packages that can be used in conjunction with PySAL for choropleth mapping:
- geopandas
- folium
- cartopy
- bokeh
PySAL Viz Module
The mapping module in PySAL is organized around three main layers:
- A lower-level layer that reads polygon, line and point shapefiles and returns a Matplotlib collection.
- A medium-level layer that performs some usual transformations on a Matplotlib object (e.g. color code polygons according to a vector of values).
- A higher-level layer intended for end-users for particularly useful cases and style preferences pre-defined (e.g. Create a choropleth).
%matplotlib inline
import numpy as np
import pysal as ps
import random as rdm
from pysal.contrib.viz import mapping as maps
from pylab import *
Lower-level component
This includes basic functionality to read spatial data from a file (currently only shapefiles supported) and produce rudimentary Matplotlib objects. The main methods are:
- map_poly_shape: to read in polygon shapefiles
- map_line_shape: to read in line shapefiles
- map_point_shape: to read in point shapefiles
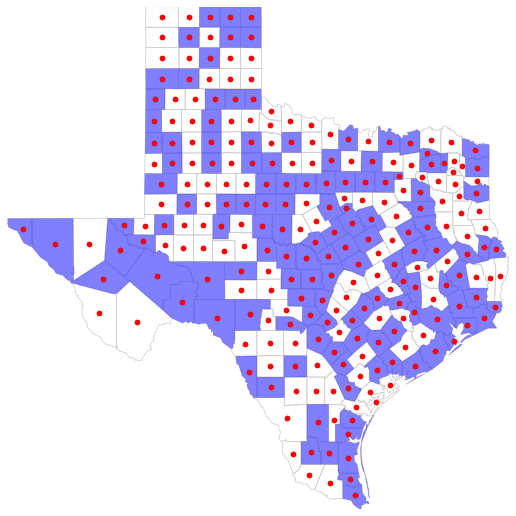
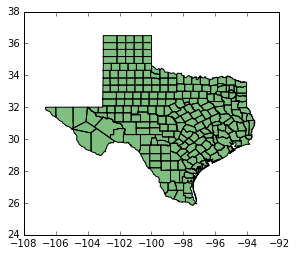
These methods all support an option to subset the observations to be plotted (very useful when missing values are present). They can also be overlaid and combined by using the setup_ax function. the resulting object is very basic but also very flexible so, for minds used to matplotlib this should be good news as it allows to modify pretty much any property and attribute.
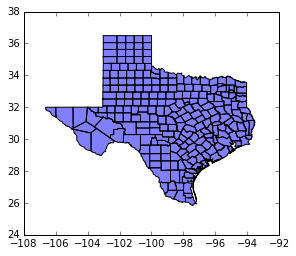
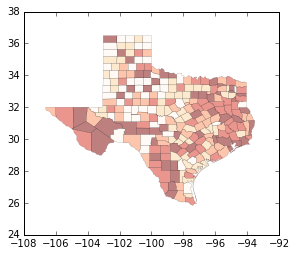
Example
shp_link = '../data/texas.shp'
shp = ps.open(shp_link)
some = [bool(rdm.getrandbits(1)) for i in ps.open(shp_link)]
fig = figure(figsize=(9,9))
base = maps.map_poly_shp(shp)
base.set_facecolor('none')
base.set_linewidth(0.75)
base.set_edgecolor('0.8')
some = maps.map_poly_shp(shp, which=some)
some.set_alpha(0.5)
some.set_linewidth(0.)
cents = np.array([poly.centroid for poly in ps.open(shp_link)])
pts = scatter(cents[:, 0], cents[:, 1])
pts.set_color('red')
ax = maps.setup_ax([base, some, pts], [shp.bbox, shp.bbox, shp.bbox])
fig.add_axes(ax)
show()
Medium-level component
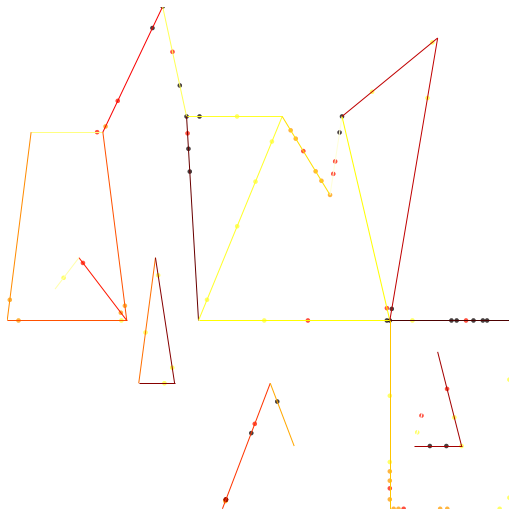
This layer comprises functions that perform usual transformations on matplotlib objects, such as color coding objects (points, polygons, etc.) according to a series of values. This includes the following methods:
base_choropleth_classlessbase_choropleth_uniquebase_choropleth_classif
Example
net_link = ps.examples.get_path('eberly_net.shp')
net = ps.open(net_link)
values = np.array(ps.open(net_link.replace('.shp', '.dbf')).by_col('TNODE'))
pts_link = ps.examples.get_path('eberly_net_pts_onnetwork.shp')
pts = ps.open(pts_link)
fig = figure(figsize=(9,9))
netm = maps.map_line_shp(net)
netc = maps.base_choropleth_unique(netm, values)
ptsm = maps.map_point_shp(pts)
ptsm = maps.base_choropleth_classif(ptsm, values)
ptsm.set_alpha(0.5)
ptsm.set_linewidth(0.)
ax = maps.setup_ax([netc, ptsm], [net.bbox, net.bbox])
fig.add_axes(ax)
show()
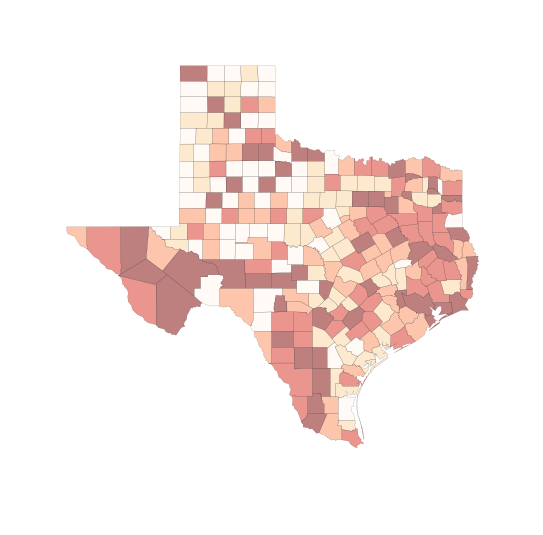
maps.plot_poly_lines('../data/texas.shp')
callng plt.show()
Higher-level component
This currently includes the following end-user functions:
plot_poly_lines: very quick shapfile plotting
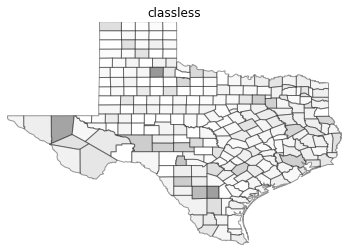
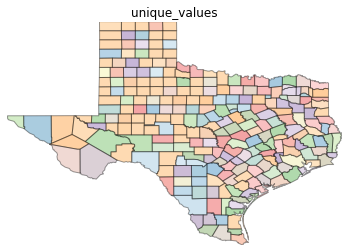
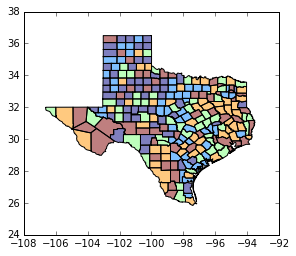
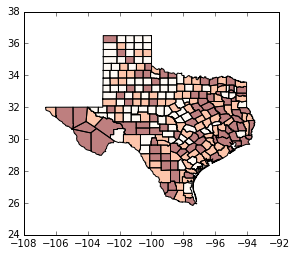
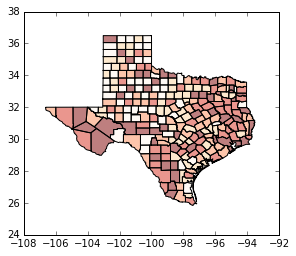
shp_link = '../data/texas.shp'
values = np.array(ps.open('../data/texas.dbf').by_col('HR90'))
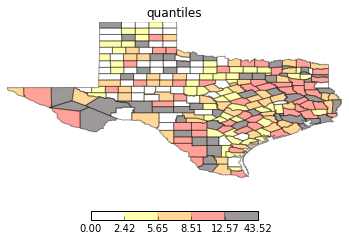
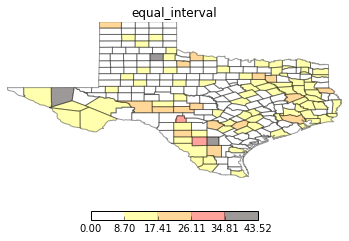
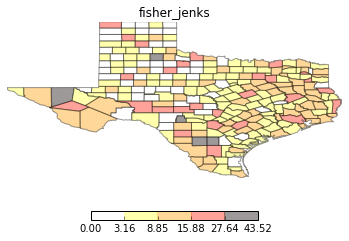
types = ['classless', 'unique_values', 'quantiles', 'equal_interval', 'fisher_jenks']
for typ in types:
maps.plot_choropleth(shp_link, values, typ, title=typ)
PySAL Map Classifiers
hr90 = values
hr90q5 = ps.Quantiles(hr90, k=5)
hr90q5
Quantiles
Lower Upper Count
========================================
x[i] <= 2.421 51
2.421 < x[i] <= 5.652 51
5.652 < x[i] <= 8.510 50
8.510 < x[i] <= 12.571 51
12.571 < x[i] <= 43.516 51
hr90q4 = ps.Quantiles(hr90, k=4)
hr90q4
Quantiles
Lower Upper Count
========================================
x[i] <= 3.918 64
3.918 < x[i] <= 7.232 63
7.232 < x[i] <= 11.414 63
11.414 < x[i] <= 43.516 64
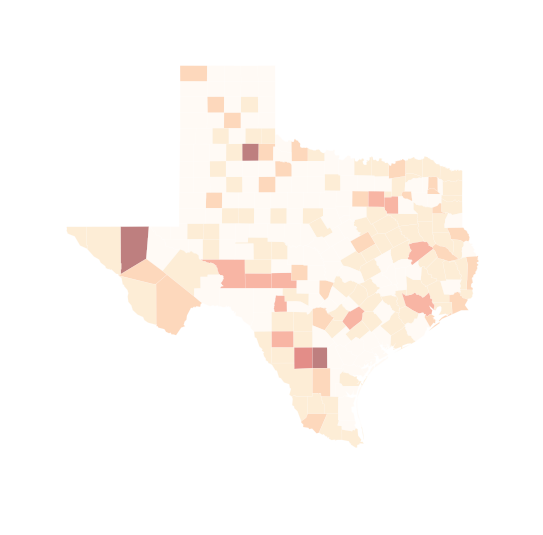
hr90e5 = ps.Equal_Interval(hr90, k=5)
hr90e5
Equal Interval
Lower Upper Count
=========================================
x[i] <= 8.703 157
8.703 < x[i] <= 17.406 76
17.406 < x[i] <= 26.110 16
26.110 < x[i] <= 34.813 2
34.813 < x[i] <= 43.516 3
hr90fj5 = ps.Fisher_Jenks(hr90, k=5)
hr90fj5
Fisher_Jenks
Lower Upper Count
=========================================
x[i] <= 3.156 55
3.156 < x[i] <= 8.846 104
8.846 < x[i] <= 15.881 64
15.881 < x[i] <= 27.640 27
27.640 < x[i] <= 43.516 4
hr90fj5.adcm # measure of fit: Absolute deviation around class means
352.10763138100003
hr90q5.adcm
361.5413784392
hr90e5.adcm
614.51093704210064
hr90fj5.yb[0:10] # what bin each value is placed in
array([0, 0, 3, 0, 1, 0, 0, 0, 0, 1])
hr90fj5.bins # upper bounds of each bin
array([ 3.15613527, 8.84642604, 15.88088069, 27.63957988, 43.51610096])
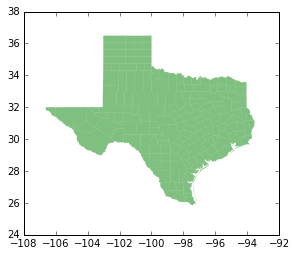
GeoPandas
import geopandas as gpd
shp_link = "../data/texas.shp"
tx = gpd.read_file(shp_link)
tx.plot(color='blue')
<matplotlib.axes._subplots.AxesSubplot at 0x11ceab6a0>
type(tx)
geopandas.geodataframe.GeoDataFrame
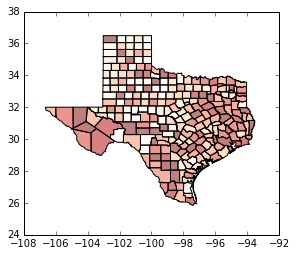
tx.plot(column='HR90', scheme='QUANTILES') # uses pysal classifier under the hood
<matplotlib.axes._subplots.AxesSubplot at 0x11dcd85f8>
tx.plot(column='HR90', scheme='QUANTILES', k=3, cmap='OrRd') # we need a continuous color map
<matplotlib.axes._subplots.AxesSubplot at 0x11e676c18>
tx.plot(column='HR90', scheme='QUANTILES', k=5, cmap='OrRd') # bump up to quintiles
<matplotlib.axes._subplots.AxesSubplot at 0x11f24fac8>
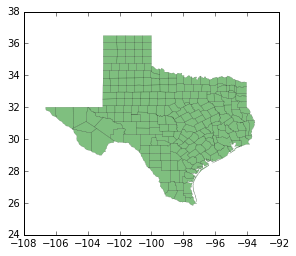
tx.plot(color='green') # explore options, polygon fills
<matplotlib.axes._subplots.AxesSubplot at 0x11fc2d630>
tx.plot(color='green',linewidth=0) # border
<matplotlib.axes._subplots.AxesSubplot at 0x12080a710>
tx.plot(color='green',linewidth=0.1) # border
<matplotlib.axes._subplots.AxesSubplot at 0x1210dfe10>
tx.plot(column='HR90', scheme='QUANTILES', k=9, cmap='OrRd') # now with qunatiles
<matplotlib.axes._subplots.AxesSubplot at 0x121cae6a0>
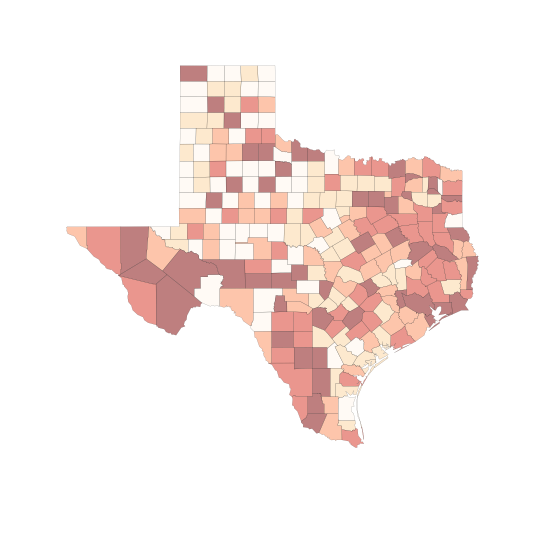
tx.plot(column='HR90', scheme='QUANTILES', k=5, cmap='OrRd', linewidth=0.1)
<matplotlib.axes._subplots.AxesSubplot at 0x1227929e8>
import matplotlib.pyplot as plt # make plot larger
f, ax = plt.subplots(1, figsize=(9, 9))
tx.plot(column='HR90', scheme='QUANTILES', k=5, cmap='OrRd', linewidth=0.1, ax=ax)
ax.set_axis_off()
plt.show()
f, ax = plt.subplots(1, figsize=(9, 9))
tx.plot(column='HR90', scheme='QUANTILES', \
k=6, cmap='OrRd', linewidth=0.1, ax=ax, \
edgecolor='white')
ax.set_axis_off()
plt.show()
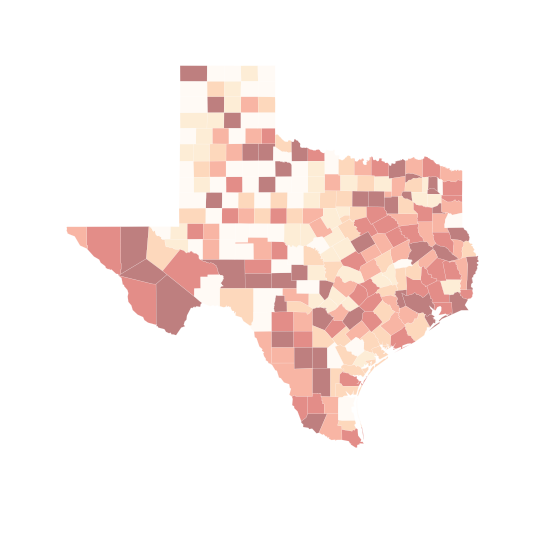
f, ax = plt.subplots(1, figsize=(9, 9))
tx.plot(column='HR90', scheme='equal_interval', \
k=6, cmap='OrRd', linewidth=0.1, ax=ax, \
edgecolor='white')
ax.set_axis_off()
plt.show()
# try deciles
f, ax = plt.subplots(1, figsize=(9, 9))
tx.plot(column='HR90', scheme='QUANTILES', k=10, cmap='OrRd', linewidth=0.1, ax=ax)
ax.set_axis_off()
plt.show()
/Users/dani/anaconda/envs/gds-scipy16/lib/python3.5/site-packages/geopandas/geodataframe.py:447: UserWarning: Invalid k: 10 (2 <= k <= 9), setting k=5 (default)
return plot_dataframe(self, *args, **kwargs)
# ok, let's work around to get deciles
q10 = ps.Quantiles(tx.HR90,k=10)
q10.bins
array([ 0. , 2.42057708, 4.59760916, 5.6524773 ,
7.23234613, 8.50963716, 10.30447074, 12.57143011,
16.6916767 , 43.51610096])
q10.yb
array([0, 0, 9, 0, 2, 0, 0, 2, 0, 3, 9, 3, 6, 4, 0, 2, 8, 0, 0, 2, 0, 2, 5,
0, 7, 6, 4, 9, 9, 8, 5, 4, 1, 3, 0, 8, 0, 4, 7, 7, 6, 5, 8, 0, 0, 0,
6, 2, 3, 9, 0, 0, 5, 8, 6, 3, 3, 6, 2, 8, 0, 0, 2, 0, 8, 2, 8, 0, 3,
0, 4, 0, 7, 9, 2, 3, 3, 8, 9, 5, 8, 0, 4, 0, 4, 0, 8, 2, 0, 2, 8, 9,
4, 6, 6, 8, 4, 3, 6, 7, 7, 5, 6, 3, 0, 4, 4, 1, 6, 0, 6, 7, 4, 6, 5,
4, 6, 0, 0, 5, 0, 2, 7, 0, 2, 2, 7, 2, 8, 9, 4, 0, 7, 5, 9, 8, 7, 5,
0, 3, 5, 3, 5, 0, 5, 0, 5, 4, 9, 7, 0, 8, 5, 0, 4, 3, 6, 8, 4, 7, 9,
5, 6, 5, 9, 0, 7, 0, 9, 6, 4, 4, 2, 9, 2, 2, 7, 3, 2, 9, 9, 8, 0, 6,
5, 7, 8, 2, 0, 9, 7, 7, 4, 3, 0, 4, 5, 8, 7, 8, 6, 9, 2, 5, 9, 2, 2,
3, 4, 8, 6, 5, 9, 9, 6, 7, 5, 7, 0, 4, 8, 6, 6, 3, 3, 7, 3, 4, 9, 7,
5, 0, 0, 3, 9, 9, 6, 2, 3, 6, 4, 3, 9, 3, 6, 3, 8, 7, 5, 0, 8, 5, 3,
7])
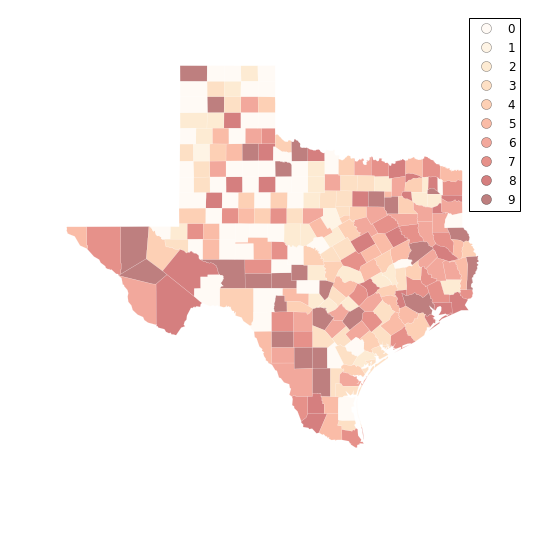
f, ax = plt.subplots(1, figsize=(9, 9))
tx.assign(cl=q10.yb).plot(column='cl', categorical=True, \
k=10, cmap='OrRd', linewidth=0.1, ax=ax, \
edgecolor='white', legend=True)
ax.set_axis_off()
plt.show()
fj10 = ps.Fisher_Jenks(tx.HR90,k=10)
fj10.bins
#labels = ["%0.1f"%l for l in fj10.bins]
#labels
f, ax = plt.subplots(1, figsize=(9, 9))
tx.assign(cl=fj10.yb).plot(column='cl', categorical=True, \
k=10, cmap='OrRd', linewidth=0.1, ax=ax, \
edgecolor='white', legend=True)
ax.set_axis_off()
plt.show()
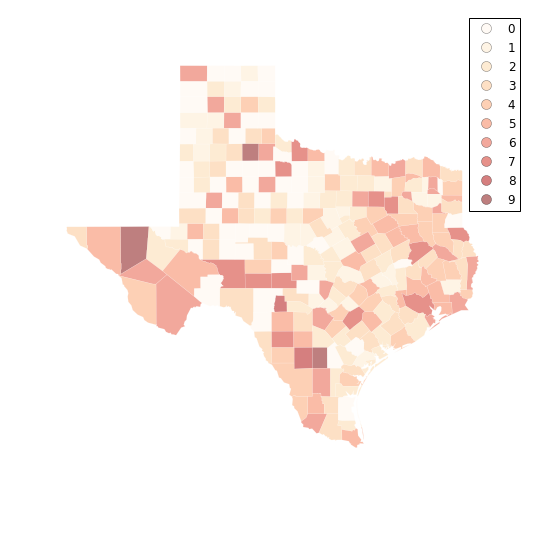
fj10.adcm
133.99950285589998
q10.adcm
220.80434598560004
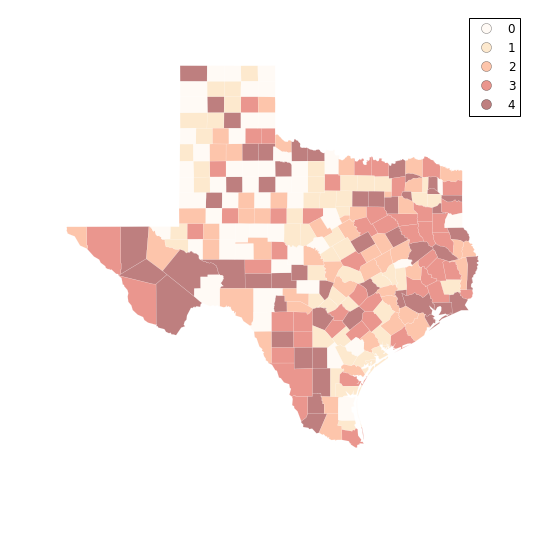
q5 = ps.Quantiles(tx.HR90,k=5)
f, ax = plt.subplots(1, figsize=(9, 9))
tx.assign(cl=q5.yb).plot(column='cl', categorical=True, \
k=10, cmap='OrRd', linewidth=0.1, ax=ax, \
edgecolor='white', legend=True)
ax.set_axis_off()
plt.show()
Folium
In addition to using matplotlib, the viz module includes components that interface with the folium library which provides a Pythonic way to generate Leaflet maps.
import pysal as ps
import geojson as gj
from pysal.contrib.viz import folium_mapping as fm
First, we need to convert the data into a JSON format. JSON, short for "Javascript Serialized Object Notation," is a simple and effective way to represent objects in a digital environment. For geographic information, the GeoJSON standard defines how to represent geographic information in JSON format. Python programmers may be more comfortable thinking of JSON data as something akin to a standard Python dictionary.
filepath = '../data/texas.shp'[:-4]
shp = ps.open(filepath + '.shp')
dbf = ps.open(filepath + '.dbf')
js = fm.build_features(shp, dbf)
Just to show, this constructs a dictionary with the following keys:
js.keys()
dict_keys(['bbox', 'type', 'features'])
js.type
'FeatureCollection'
js.bbox
[-106.6495132446289, 25.845197677612305, -93.50721740722656, 36.49387741088867]
js.features[0]
{"bbox": [-100.5494155883789, 36.05754852294922, -99.99715423583984, 36.49387741088867], "geometry": {"coordinates": [[[-100.00686645507812, 36.49387741088867], [-100.00114440917969, 36.49251937866211], [-99.99715423583984, 36.05754852294922], [-100.54059600830078, 36.058135986328125], [-100.5494155883789, 36.48944854736328], [-100.00686645507812, 36.49387741088867]]], "type": "Polygon"}, "properties": {"BLK60": 0.029359953, "BLK70": 0.0286861733, "BLK80": 0.0265533723, "BLK90": 0.0318167356, "CNTY_FIPS": "295", "COFIPS": 295, "DNL60": 1.293817423, "DNL70": 1.3170337879, "DNL80": 1.3953635084, "DNL90": 1.2153856529, "DV60": 1.4948859166, "DV70": 2.2709475333, "DV80": 3.5164835165, "DV90": 6.1016949153, "FH60": 6.7245119306, "FH70": 4.5, "FH80": 3.8353601497, "FH90": 6.0935799782, "FIPS": "48295", "FIPSNO": 48295, "FP59": 22.4, "FP69": 12.1, "FP79": 10.851262862, "FP89": 9.1403699674, "GI59": 0.2869290401, "GI69": 0.378218563, "GI79": 0.4070049836, "GI89": 0.3730049522, "HC60": 0.0, "HC70": 0.0, "HC80": 0.0, "HC90": 0.0, "HR60": 0.0, "HR70": 0.0, "HR80": 0.0, "HR90": 0.0, "MA60": 32.4, "MA70": 34.3, "MA80": 31.0, "MA90": 35.8, "MFIL59": 8.5318847402, "MFIL69": 8.9704320743, "MFIL79": 9.8020637224, "MFIL89": 10.252241206, "NAME": "Lipscomb", "PO60": 3406, "PO70": 3486, "PO80": 3766, "PO90": 3143, "POL60": 8.1332938612, "POL70": 8.1565102261, "POL80": 8.2337687092, "POL90": 8.0529330368, "PS60": -1.514026445, "PS70": -1.449058083, "PS80": -1.476411495, "PS90": -1.571799202, "RD60": -0.917851658, "RD70": -0.602337681, "RD80": -0.355503211, "RD90": -0.605606852, "SOUTH": 1, "STATE_FIPS": "48", "STATE_NAME": "Texas", "STFIPS": 48, "UE60": 2.0, "UE70": 1.7, "UE80": 1.9411764706, "UE90": 1.7328519856}, "type": "Feature"}
Then, we write the json to a file:
with open('./example.json', 'w') as out:
gj.dump(js, out)
Mapping
Let's look at the columns that we are going to map.
list(js.features[0].properties.keys())[:5]
['DNL90', 'RD90', 'HR90', 'FH80', 'DNL70']
We can map these attributes by calling them as arguments to the choropleth mapping function:
fm.choropleth_map?
# folium maps have been turned off for creating gitbook.
# to run them, uncomment.
fm.choropleth_map('./example.json', 'FIPS', 'HR90',zoom_start=6)
/Users/dani/anaconda/envs/gds-scipy16/lib/python3.5/site-packages/folium/folium.py:504: UserWarning: This method is deprecated. Please use Map.choropleth instead.
warnings.warn('This method is deprecated. '
This produces a map using default classifications and color schemes and saves it to an html file. We set the function to have sane defaults. However, if the user wants to have more control, we have many options available.
There are arguments to change the classification scheme:
# folium maps have been turned off for creating gitbook.
# to run them, uncomment.
fm.choropleth_map('./example.json', 'FIPS', 'HR90', classification = 'Quantiles',classes=4)
/Users/dani/anaconda/envs/gds-scipy16/lib/python3.5/site-packages/folium/folium.py:504: UserWarning: This method is deprecated. Please use Map.choropleth instead.
warnings.warn('This method is deprecated. '
Most PySAL classifiers are supported.
Base Map Type
# folium maps have been turned off for creating gitbook.
# to run them, uncomment.
fm.choropleth_map('./example.json', 'FIPS', 'HR90', classification = 'Jenks Caspall', \
tiles='Stamen Toner',zoom_start=6, save=True)
/Users/dani/anaconda/envs/gds-scipy16/lib/python3.5/site-packages/folium/folium.py:504: UserWarning: This method is deprecated. Please use Map.choropleth instead.
warnings.warn('This method is deprecated. '
We support the entire range of builtin basemap types in Folium, but custom tilesets from MapBox are not supported (yet).
Color Scheme
# folium maps have been turned off for creating gitbook.
# to run them, uncomment.
fm.choropleth_map('./example.json', 'FIPS', 'HR80', classification = 'Jenks Caspall', \
tiles='Stamen Toner', fill_color = 'PuBuGn', save=True)
/Users/dani/anaconda/envs/gds-scipy16/lib/python3.5/site-packages/folium/folium.py:504: UserWarning: This method is deprecated. Please use Map.choropleth instead.
warnings.warn('This method is deprecated. '
All color schemes are Color Brewer and simply pass through to Folium on execution.
Folium supports up to 6 classes.
Cartopy
Next we turn to cartopy.
import matplotlib.patches as mpatches
import matplotlib.pyplot as plt
import cartopy.crs as ccrs
import cartopy.io.shapereader as shpreader
reader = shpreader.Reader("../data/texas.shp")
def choropleth(classes, colors, reader, legend=None, title=None, fileName=None, dpi=600):
ax = plt.axes([0,0,1,1], projection=ccrs.LambertConformal())
ax.set_extent([-108, -93, 38, 24], ccrs.Geodetic())
ax.background_patch.set_visible(False)
ax.outline_patch.set_visible(False)
if title:
plt.title(title)
ax.set_extent([-108, -93, 38, 24], ccrs.Geodetic())
ax.background_patch.set_visible(False)
ax.outline_patch.set_visible(False)
for i,state in enumerate(reader.geometries()):
facecolor = colors[classes[i]]
#facecolor = 'red'
edgecolor = 'black'
ax.add_geometries([state], ccrs.PlateCarree(),
facecolor=facecolor, edgecolor=edgecolor)
leg = [ mpatches.Rectangle((0,0),1,1, facecolor=color) for color in colors]
if legend:
plt.legend(leg, legend, loc='lower left', bbox_to_anchor=(0.025, -0.1), fancybox=True)
if fileName:
plt.savefig(fileName, dpi=dpi)
plt.show()
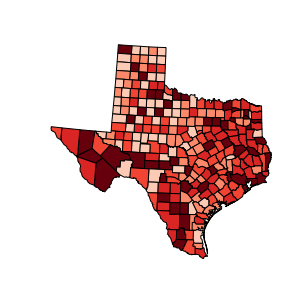
HR90 = values
bins_q5 = ps.Quantiles(HR90, k=5)
bwr = plt.cm.get_cmap('Reds')
bwr(.76)
c5 = [bwr(c) for c in [0.2, 0.4, 0.6, 0.7, 1.0]]
classes = bins_q5.yb
choropleth(classes, c5, reader)
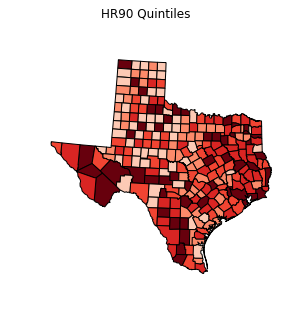
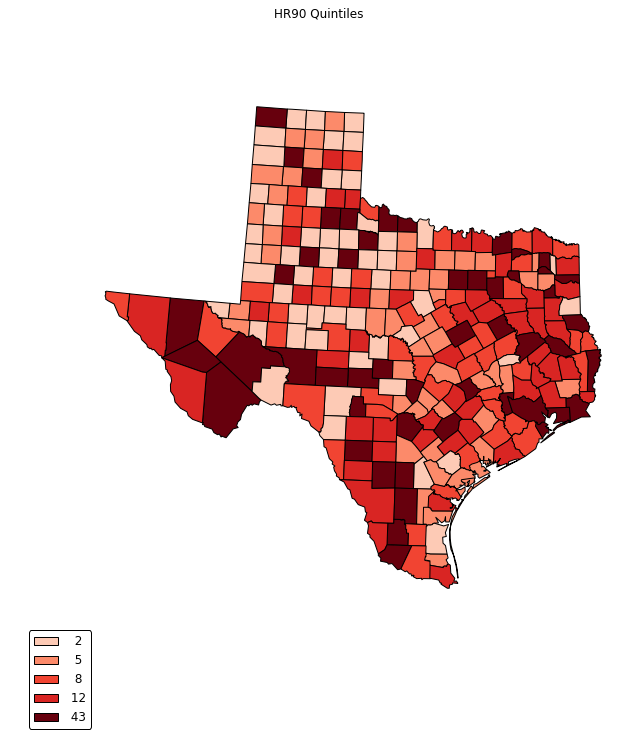
choropleth(classes, c5, reader, title="HR90 Quintiles")
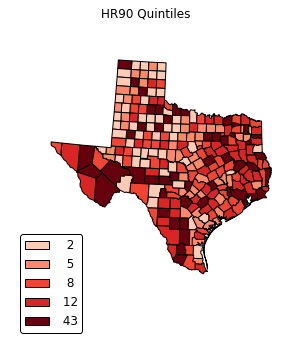
legend =[ "%3d"%ub for ub in bins_q5.bins]
choropleth(classes, c5, reader, legend, title="HR90 Quintiles")
def choropleth(classes, colors, reader, legend=None, title=None, fileName=None, dpi=600):
f, ax = plt.subplots(1, figsize=(9,9))
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
ax.axison=False
ax = plt.axes([0,0,1,1], projection=ccrs.LambertConformal())
ax.set_extent([-108, -93, 38, 24], ccrs.Geodetic())
ax.background_patch.set_visible(False)
ax.outline_patch.set_visible(False)
if title:
plt.title(title)
ax.set_extent([-108, -93, 38, 24], ccrs.Geodetic())
ax.background_patch.set_visible(False)
ax.outline_patch.set_visible(False)
for i,state in enumerate(reader.geometries()):
facecolor = colors[classes[i]]
#facecolor = 'red'
edgecolor = 'black'
ax.add_geometries([state], ccrs.PlateCarree(),
facecolor=facecolor, edgecolor=edgecolor)
leg = [ mpatches.Rectangle((0,0),1,1, facecolor=color) for color in colors]
if legend:
plt.legend(leg, legend, loc='lower left', bbox_to_anchor=(0.025, -0.1), fancybox=True)
if fileName:
plt.savefig(fileName, dpi=dpi)
#ax.set_axis_off()
plt.show()
legend =[ "%3d"%ub for ub in bins_q5.bins]
choropleth(classes, c5, reader, legend, title="HR90 Quintiles")
legend =[ "%3d"%ub for ub in bins_q5.bins]
choropleth(classes, c5, reader, legend, title="HR90 Quintiles")
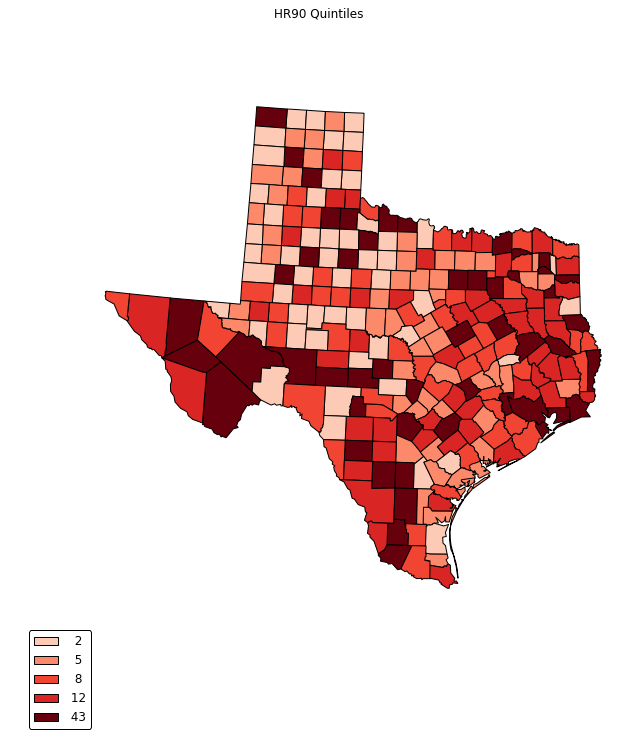
def choropleth(classes, colors, reader, legend=None, title=None, fileName=None, dpi=600):
f, ax = plt.subplots(1, figsize=(9,9), frameon=False)
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
ax.axison=False
ax = plt.axes([0,0,1,1], projection=ccrs.LambertConformal())
ax.set_extent([-108, -93, 38, 24], ccrs.Geodetic())
ax.background_patch.set_visible(False)
ax.outline_patch.set_visible(False)
if title:
plt.title(title)
for i,state in enumerate(reader.geometries()):
facecolor = colors[classes[i]]
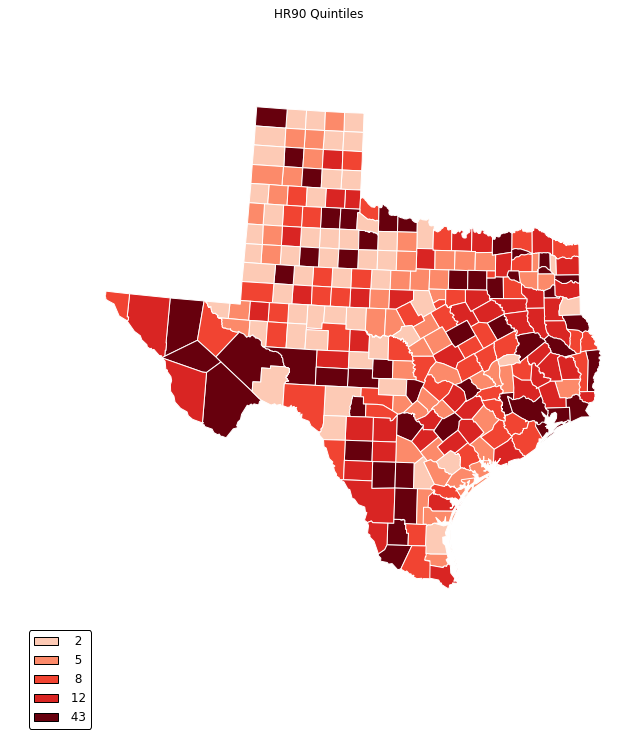
edgecolor = 'white'
ax.add_geometries([state], ccrs.PlateCarree(),
facecolor=facecolor, edgecolor=edgecolor)
leg = [ mpatches.Rectangle((0,0),1,1, facecolor=color) for color in colors]
if legend:
plt.legend(leg, legend, loc='lower left', bbox_to_anchor=(0.025, -0.1), fancybox=True)
if fileName:
plt.savefig(fileName, dpi=dpi)
plt.show()
legend =[ "%3d"%ub for ub in bins_q5.bins]
choropleth(classes, c5, reader, legend, title="HR90 Quintiles")
For an example publication and code where Cartopy was used for the mapping see: Rey (2016).
Bokeh
from collections import OrderedDict
#from bokeh.sampledata import us_counties, unemployment
from bokeh.plotting import figure, show, output_notebook, ColumnDataSource
from bokeh.models import HoverTool
from bokeh.charts import Scatter, output_file, show
def gpd_bokeh(df):
"""Convert geometries from geopandas to bokeh format"""
nan = float('nan')
lons = []
lats = []
for i,shape in enumerate(df.geometry.values):
if shape.geom_type == 'MultiPolygon':
gx = []
gy = []
ng = len(shape.geoms) - 1
for j,member in enumerate(shape.geoms):
xy = np.array(list(member.exterior.coords))
xs = xy[:,0].tolist()
ys = xy[:,1].tolist()
gx.extend(xs)
gy.extend(ys)
if j < ng:
gx.append(nan)
gy.append(nan)
lons.append(gx)
lats.append(gy)
else:
xy = np.array(list(shape.exterior.coords))
xs = xy[:,0].tolist()
ys = xy[:,1].tolist()
lons.append(xs)
lats.append(ys)
return lons,lats
lons, lats = gpd_bokeh(tx)
p = figure(title="Texas", toolbar_location='left',
plot_width=1100, plot_height=700)
p.patches(lons, lats, fill_alpha=0.7, #fill_color=state_colors,
line_color="#884444", line_width=2, line_alpha=0.3)
output_file('choropleth.html', title="choropleth.py example")
show(p)
bwr = plt.cm.get_cmap('Reds')
bwr(.76)
c5 = [bwr(c) for c in [0.2, 0.4, 0.6, 0.7, 1.0]]
classes = bins_q5.yb
colors = [c5[i] for i in classes]
colors5 = ["#F1EEF6", "#D4B9DA", "#C994C7", "#DF65B0", "#DD1C77"]
colors = [colors5[i] for i in classes]
p = figure(title="Texas HR90 Quintiles", toolbar_location='left',
plot_width=1100, plot_height=700)
p.patches(lons, lats, fill_alpha=0.7, fill_color=colors,
line_color="#884444", line_width=2, line_alpha=0.3)
output_file('choropleth.html', title="choropleth.py example")
show(p)
Hover
from bokeh.models import HoverTool
from bokeh.plotting import figure, show, output_file, ColumnDataSource
source = ColumnDataSource(data=dict(
x=lons,
y=lats,
color=colors,
name=tx.NAME,
rate=HR90
))
TOOLS = "pan, wheel_zoom, box_zoom, reset, hover, save"
p = figure(title="Texas Homicide 1990 (Quintiles)", tools=TOOLS,
plot_width=900, plot_height=900)
p.patches('x', 'y', source=source,
fill_color='color', fill_alpha=0.7,
line_color='white', line_width=0.5)
hover = p.select_one(HoverTool)
hover.point_policy = 'follow_mouse'
hover.tooltips = [
("Name", "@name"),
("Homicide rate", "@rate"),
("(Long, Lat)", "($x, $y)"),
]
output_file("hr90.html", title="hr90.py example")
show(p)
Exercises
- Using Bokeh, use PySALs Fisher Jenks classifier with k=10 to generate a choropleth map of the homicide rates in 1990 for Texas counties. Modify the hover tooltips so that in addition to showing the Homicide rate, the rank of that rate is also shown.
- Explore
ps.esda.mapclassify.(hint: use tab completion) to select a new classifier (different from the ones in this notebook). Using the same data as in exercise 1, apply this classifier and create a choropleth using Bokeh.