Road friction surface for Cambodia
Contents
Road friction surface for Cambodia¶
Important
Please see here for more details
import pandas, geopandas
import contextily
import xarray, rioxarray
from rasterstats import zonal_stats
Boundaries¶
Important
Please see here for more details
url = (
"https://geonode.wfp.org/geoserver/wfs"\
"?format_options=charset:UTF-8&"\
"typename=geonode:khm_adm2_un&"\
"outputFormat=SHAPE-ZIP&"\
"version=1.0.0&"\
"service=WFS&"\
"request=GetFeature"
)
url
'https://geonode.wfp.org/geoserver/wfs?format_options=charset:UTF-8&typename=geonode:khm_adm2_un&outputFormat=SHAPE-ZIP&version=1.0.0&service=WFS&request=GetFeature'
cam = geopandas.read_file(url)
bb = cam.total_bounds
Friction surfaces¶
Motorised¶
out_fm = "cambodia_2020_motorized_friction_surface.tif"
! rm -f $out_fm
r = xarray.open_rasterio("2020_motorized_friction_surface.geotiff")
motor = r.rio.clip_box(*bb).squeeze()
motor.rio.to_raster(out_fm)
! du -h $out_fm
1.5M cambodia_2020_motorized_friction_surface.tif
/opt/conda/lib/python3.8/site-packages/pyproj/crs/crs.py:280: FutureWarning: '+init=<authority>:<code>' syntax is deprecated. '<authority>:<code>' is the preferred initialization method. When making the change, be mindful of axis order changes: https://pyproj4.github.io/pyproj/stable/gotchas.html#axis-order-changes-in-proj-6
projstring = _prepare_from_string(projparams)
Walking¶
out_fw = "cambodia_2020_walking_friction_surface.tif"
! rm -f $out_fw
r = xarray.open_rasterio("2020_walking_only_friction_surface.geotiff")
walk = r.rio.clip_box(*bb).squeeze()
walk.rio.to_raster(out_fw)
! du -h $out_fw
1.5M cambodia_2020_walking_friction_surface.tif
Regional friction¶
Motorised
agg_m = pandas.DataFrame(
zonal_stats(
cam,
out_fm
),
index = cam.index
)
Walking
agg_w = pandas.DataFrame(
zonal_stats(
cam,
out_fw
),
index = cam.index
)
Join together
db = cam[[
"adm2_name", "adm2_altnm", "geometry"
]].join(
agg_m[["mean"]].rename(columns={"mean": "motor_mean"})
).join(
agg_w[["mean"]].rename(columns={"mean": "walk_mean"})
)
db.info()
<class 'geopandas.geodataframe.GeoDataFrame'>
RangeIndex: 198 entries, 0 to 197
Data columns (total 5 columns):
# Column Non-Null Count Dtype
--- ------ -------------- -----
0 adm2_name 198 non-null object
1 adm2_altnm 122 non-null object
2 geometry 198 non-null geometry
3 motor_mean 198 non-null float64
4 walk_mean 198 non-null float64
dtypes: float64(2), geometry(1), object(2)
memory usage: 7.9+ KB
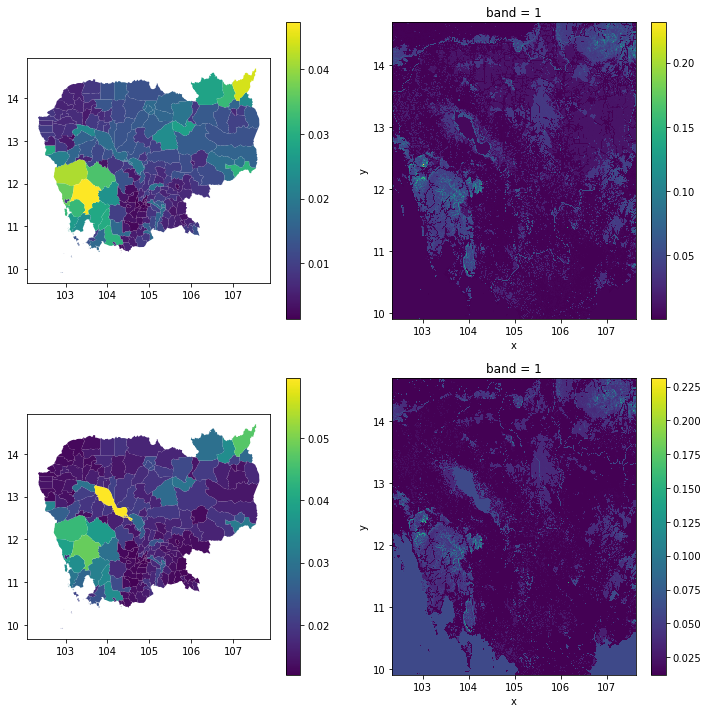
Visual overview¶
import matplotlib.pyplot as plt
f, axs = plt.subplots(2, 2, figsize=(12, 12))
db.plot("motor_mean", legend=True, ax=axs[0, 0])
r = xarray.open_rasterio(out_fm)
r.where(r>r.nodatavals).plot(ax=axs[0, 1])
db.plot("walk_mean", legend=True, ax=axs[1, 0])
r = xarray.open_rasterio(out_fw)
r.where(r>r.nodatavals).plot(ax=axs[1, 1])
plt.show()